Force and Acceleration
 Doug
Doug
 Post a Comment
Post a Comment
 1 Reference
1 Reference
In changing from a quantitative interpretation of number (QI), to an operational interpretation (OI), we found, in the previous post below, that we can speak in terms of multi-dimensional magnitudes that are not products, but sums of two, or more, one-dimensional, magnitudes. In this way, the three space|time magnitudes of a fermion S|T triplet, represented by the vertices of the triangle, constitute the three dimensions of the triplet, even though three points (S|Ts) can only lie in a plane, geometrically. By the same token, two points (S|Ts), constitute a two-dimensional entity, even though two points can only lie in a line, geometrically speaking.
If we add another point (S|T) to the triplet, we form a four-dimensional entity, which is three-dimensional geometrically, and adding a fifth point (S|T), we form a five-dimensional entity, which is also three-dimensional geometrically, but extended in one of the three dimensions. Therefore, while the evolution of the geometric dimensions of these S|T combinations is limited to three degrees, from a point to a line, from a line to a plane, and from a plane to a tetrahedron, which is the first 3D geometry, the evolution of their numerical dimensions is unlimited.
Moreover, with the reciprocal number (RN) of the reciprocal system of mathematics (RSM), we can express the total number of speed-displacements of an S|T unit, or a multi-dimensional combination of S|T units, in terms of the total number of such displacements, beginning with an absolute minimum value of an initial S|T unit:
ds|dt = 1|2 + 1|1 + 2|1 = 4|4 num
By adding SUDRs and/or TUDRs to this initial, or first, number, we can increase the value, or compound the magnitude, we might say, of the point. For instance, adding a SUDR to the initial unit increases the total magnitude of the above point (S|T) from four units of progression to six units:
ds|dt = (1|2) + [(1|2) + (1|1) + (2|1)] = (2|4) + (2|1) + (2|1) = 6|6 num
(recalling that the minimum number of displaceable units of progression is two units, an outward and an inward unit), where “num” denotes natural units of motion. Subsequently adding a TUDR to this number, increases the total magnitude of the point to eight natural units of motion:
(2|1) + [(2|4) + (1|1) + (2|1)] = (2|4) + (2|2) + (4|2) = 8|8 num
We can also add two or more points directly, forming a combined point of higher magnitude:
ds|dt = [1|2 + 1|1 + 2|1] + [1|2 + 1|1 + 2|1] = (2|4) + (2|2) + (4|2) = 8|8 num
So far so good. We can easily sum the dimensions of the S|T combos this way, but there is much more to describing the structure of the physical universe than summing the possible combinations of S|T units. The universe of motion consists of discrete units of motion, combinations of discrete units of motion, and relations between discrete units of motion. It is the relation between the units, and combination of units, that is most challenging.
Indeed, in the legacy system of physical theory (LST), the relation between physical entities is the sole means for classifying them. The goal of that program has been to develop a classification of physical entities, according to the kinds of relations between them. These have been identified by LST scientists as the gravitational, electromagnetic, and nuclear relations (including both weak and strong relations) that bind the constituent entities together and determine their behavior under varying conditions and in different environments. These interactions are described in terms of force, as defined by Sir Isaac Newton, who defined it as an “influence” that has the potential to cause a physical entity, or set of physical entities, to change positions, relative to another physical entity, or set of physical entities.
However, in Larson’s new system, motion is defined without necessarily referring to the relative positions of physical entities. In this system, space changes just as time changes, unrelentingly, as part of a pre-existing, universal, motion, and no object, with a definite location, or momentum, is included in its definition. It follows, therefore, that a new definition of force is in order, which applies to the inherent motion of physical entities. This is what is referred to as “self force,” and it is has been an enigmatic concept from the beginning in LST science, because of their definition of motion.
However, even in the development of RST-based theory, it’s a challenge, because Larson didn’t redefine Newton’s concept of force, at least not explicitly. Nevertheless, he does clarify the concept in general, which he finds distorted by the LST community’s insistence in regarding it as a fundamental entity, rather than a property of motion; that is, he asserts that force, by definition, cannot be the cause of motion in the ultimate sense. It is true that it may cause the change of position of an object, or M2 motion, via an exchange of momentum, but this is quite different than attributing the properties of physical entities, such as electrical charge, to the existence of an autonomous force that is somehow distributed about a point, such as an electron, which has no observable physical extent.
It is clear, when we examine the dimensions of force, that they are the dimensions of energy, dt/ds, per unit of space, or dt/ds * 1/ds = dt/ds2. In other words, the dimensions are an expression of the spatial density of energy, a scalar quantity, which, in the new system, is inverse speed. Thus, force is the inverse of acceleration, not in the mathematical sense, but in the conceptual sense, in that acceleration is the temporal density of speed, ds/dt, per unit of time, or ds/dt * 1/t = ds/dt2. However, in the context of the limited definition of motion in the LST, these dimensions of force and acceleration can also be consistently interpreted as a change in energy per unit of length, and a change of velocity per unit of time, consequently defining them as non-scalar quantities, with the property of direction in one dimension, a vector, rather than the property of a varying scalar density.
Nonetheless, the vectorial concept of force, as the change of units of energy per unit of length is just another way at looking at the inverse square law. As the distance, or radius, from a point (S|T), with a given quantity of energy, or units of inverse speed-displacement, increases, so does the area of the spherical surface, representing the distribution of these scalar units, at that distance, as illustrated in figure 1 below.
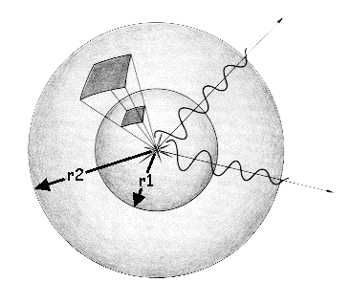
Figure 1. Inverse Square Law as Scalar Density
In our system, the units of inverse speed may be equal to, greater than, or less than, units of speed, the two together forming the total units of progression that constitutes a given S|T unit. Thus, the inherent energy (inverse speed) density of an S|T unit (point), is the ratio of inverse speed-displacement units to the S|T’s total number of progression units, and the speed density, the acceleration, of an S|T unit (point), is the ratio of speed-displacement units, to the total number of the S|T’s progression units. However, the total effect of the inherent motion of a given S|T unit (point), on another S|T unit (point), is determined by the distance between the two units (points), which decreases the density of the motion per unit area, as shown in the illustration above. Thus, it obeys the inverse square law from an energy (inverse speed) spatial density perspective (force), and a speed temporal density perspective (acceleration).
Of course, the temporal density of speed is an entirely new concept that will require much more development. Larson found that its effect is reduced by the inter-regional ratio, a measured physical constant with a dimensionless value of 156.4444…, representing the directional properties of time relative to those of space. More on this later.
 View Printer Friendly Version
View Printer Friendly Version Email Article to Friend
Email Article to FriendReferences (1)
-
 Response: Smart Contract Audit ServicesHire a leading Smart Contract Audit Company that has hands-on experience on the various Blockchain frameworks like ETH, BSC, PolkaDot, and others.
Response: Smart Contract Audit ServicesHire a leading Smart Contract Audit Company that has hands-on experience on the various Blockchain frameworks like ETH, BSC, PolkaDot, and others.
Reader Comments